I built a small underwater robot that I can drive from the surface using a video screen. It can go about 100 ft down, and has enough thrust that it can move around pretty comfortably in weak currents.
For example, here’s a video of crabs fighting over the bait in a crab pot (the owner of the pot would prefer them to settle their differences inside the pot):
Here’s the ROV itself:
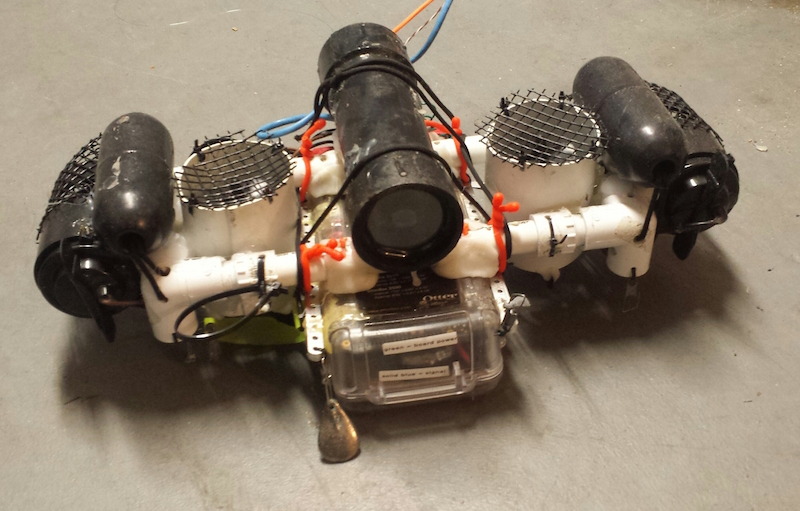
The control system runs on Beaglebone and is written in Python. It uses onboard batteries and the thrusters are modified bilge pumps.
Here’s a picture of Rachel driving it on a nice day:

Here’s a picture of me driving it on a wet day (and trying out a goggle configuration):

It’s been very useful to see what’s happening in Puget Sound and other areas. Here’s what you can see underneath the fishing pier at Edmonds:
Here’s what you see underneath the pier at Golden Gardens:
The following clip was taken on a ROV dive around Monterey Bay, California. You can see a surprised otter, fish and other wildlife. The water is quite cold, and it’s therefore nice to be able to see the wildlife without getting cold doing a scuba dive.